What is Pro-Act?
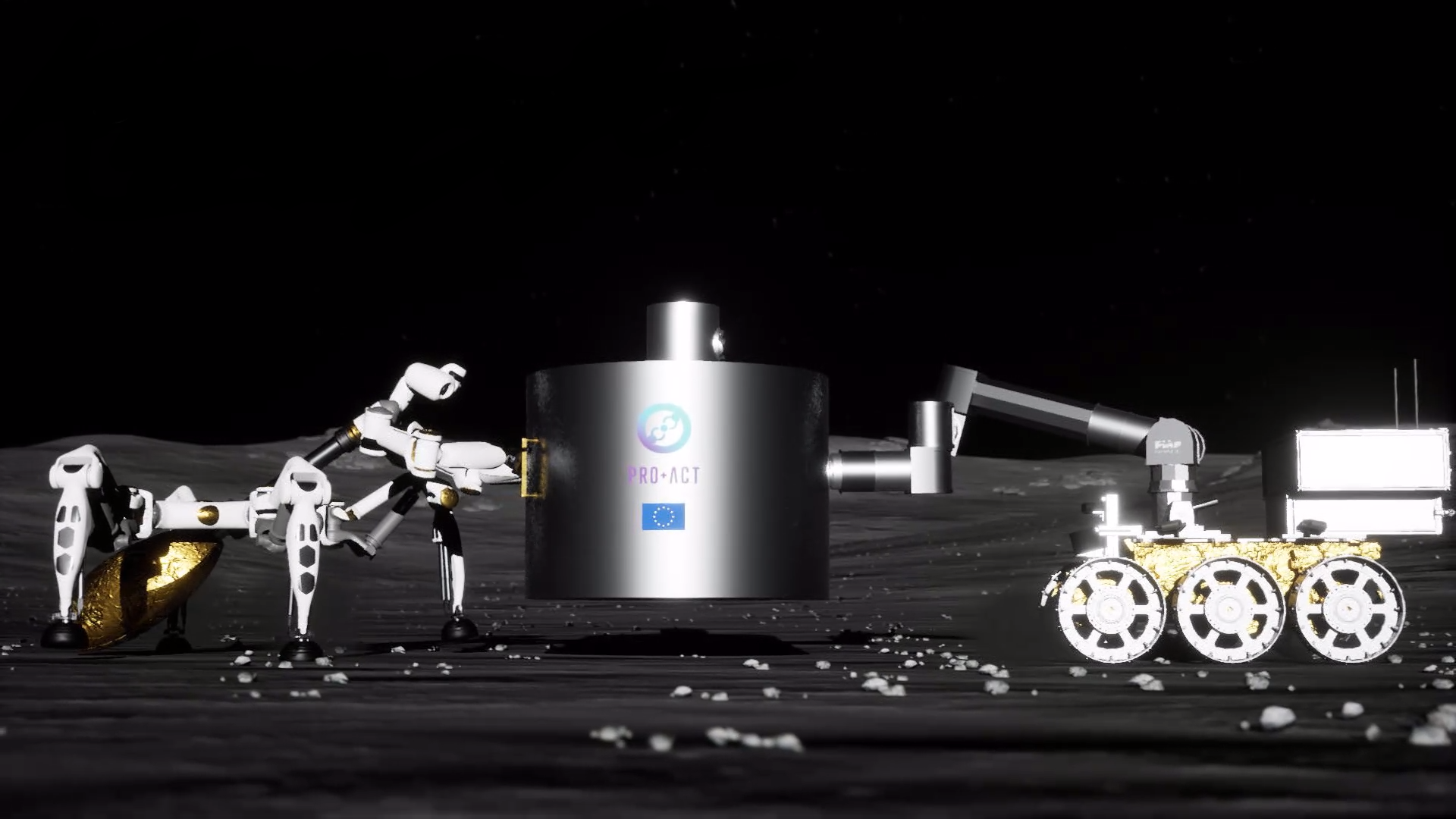
PRO-ACT – robotic collaboration for ISRU
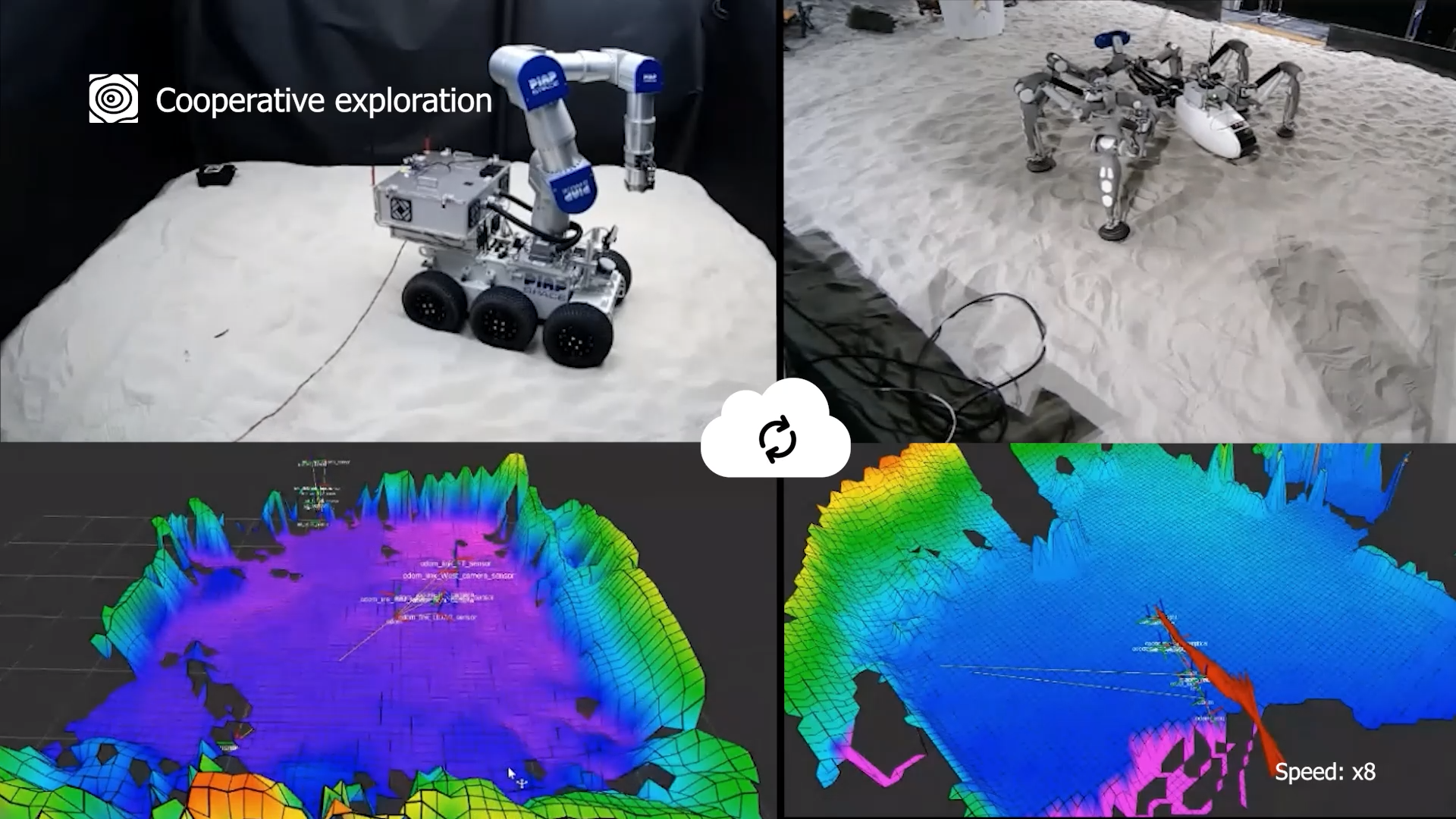
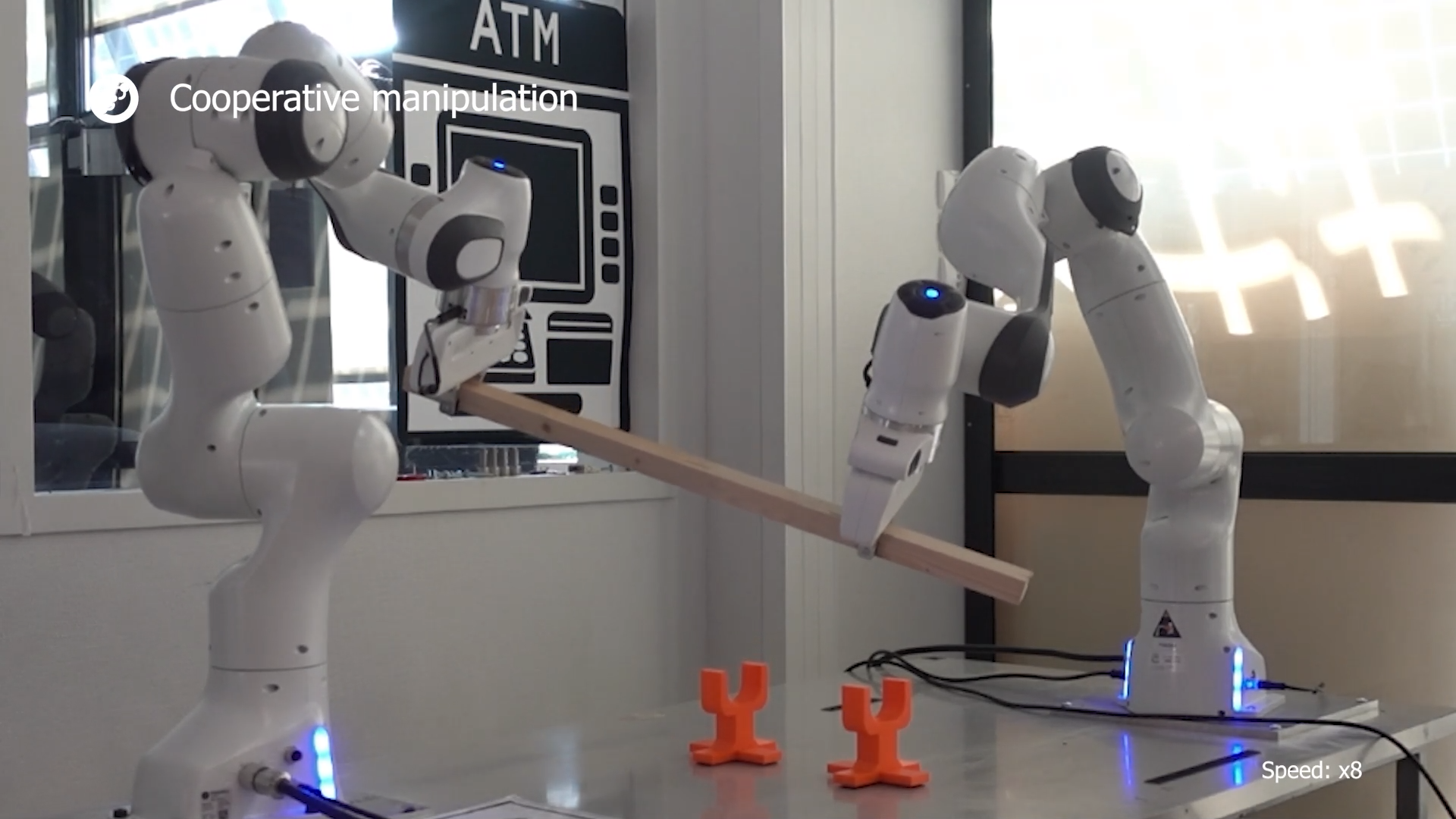
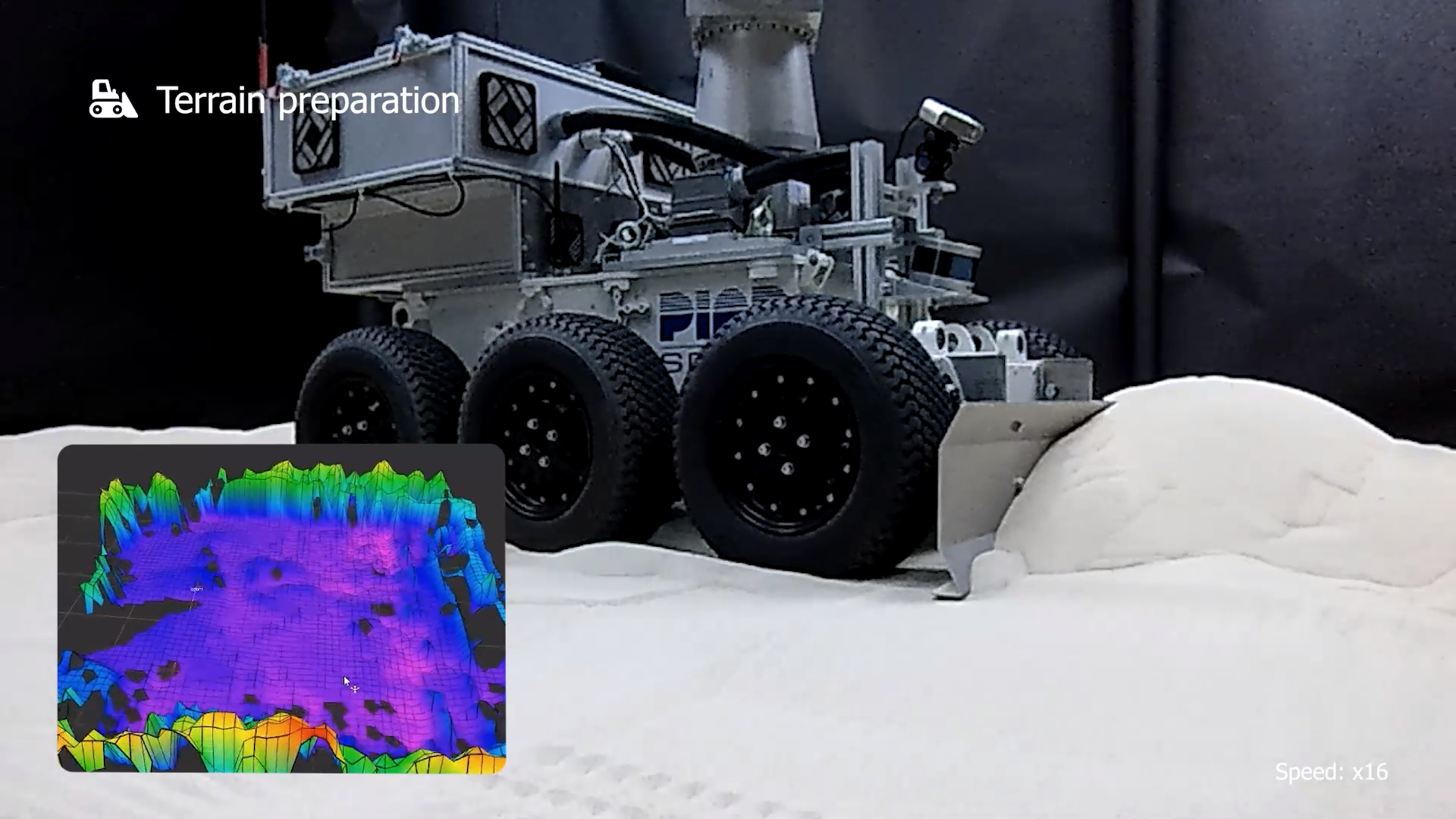
The Horizon 2020 EU-funded PRO-ACT project will aim to develop and demonstrate a cooperation and manipulation capabilities between three robots for assembling an in-situ resource utilisation (ISRU) plant. The project will build on the technological results of other project outcomes from the PERASPERA project and its operational grants (OGs). PRO-ACT will show how robot working agents, or RWAs, can work together collaboratively to achieve a common goal.